 GitBucket
GitBucket
Cassie
tag: Agility Robotics 仿生 地面 双足

Fig1. Cassie在野外测试中的样子
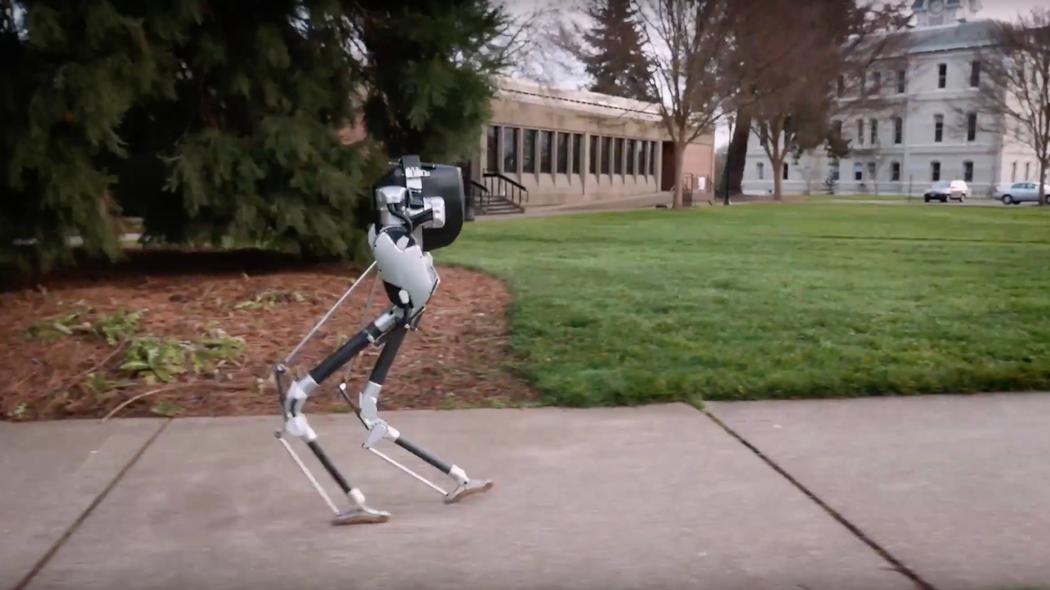
Fig2. Cassie在行走中的样子
Cassie是由俄勒冈州立大学出来的初创企业Agility Robotics开发的能够双足行走的机器人,外形类似没有头的鸵鸟(虽然官方说他们并不是刻意模仿鸵鸟的)。Agility Robotics的成员之前曾开发过类似的研究用双足机器人MARLO与ATRIAS。这两机器人的开发经验奠定了Cassie的基础。
Cassie的行走基于spring-mass model,类似于Boston Dynamics的机器人的行走方式。
硬件
Cassie是一个行走时能量利用效率较高的机器人。经过机械结构的优化,控制算法的优化,以及定制的驱动器等,虽然其搭载的电池较小,但能够单次充电运行6~8小时。
Cassie的机械结构的特点:
- 每条腿有4个自由度(非官方数据,通过从图片与视频观察得出)
- 每个关节由电机驱动
- 所有电机均布置在离髋关节(Cassie的话应该叫头?)很近的位置,因此行走时挥动的质量很小,需要的能量就小。
- 膝关节是由电机通过连杆驱动的,并且在膝关节还有一块能够弯曲的弹性板材,充当弹簧的作用。
- 足部面积很小
应用场景
其活动范围与人类基本无异,能够到人能所到的地方。
具体的应用场景有:
- 送货,并且可以利用已有的路面与行人道
- 野外探索
- 抢险救灾
- 双足研究平台