 GitBucket
GitBucket
SEA-Snake
tag: Biorobotics Lab CMU 仿生 地面
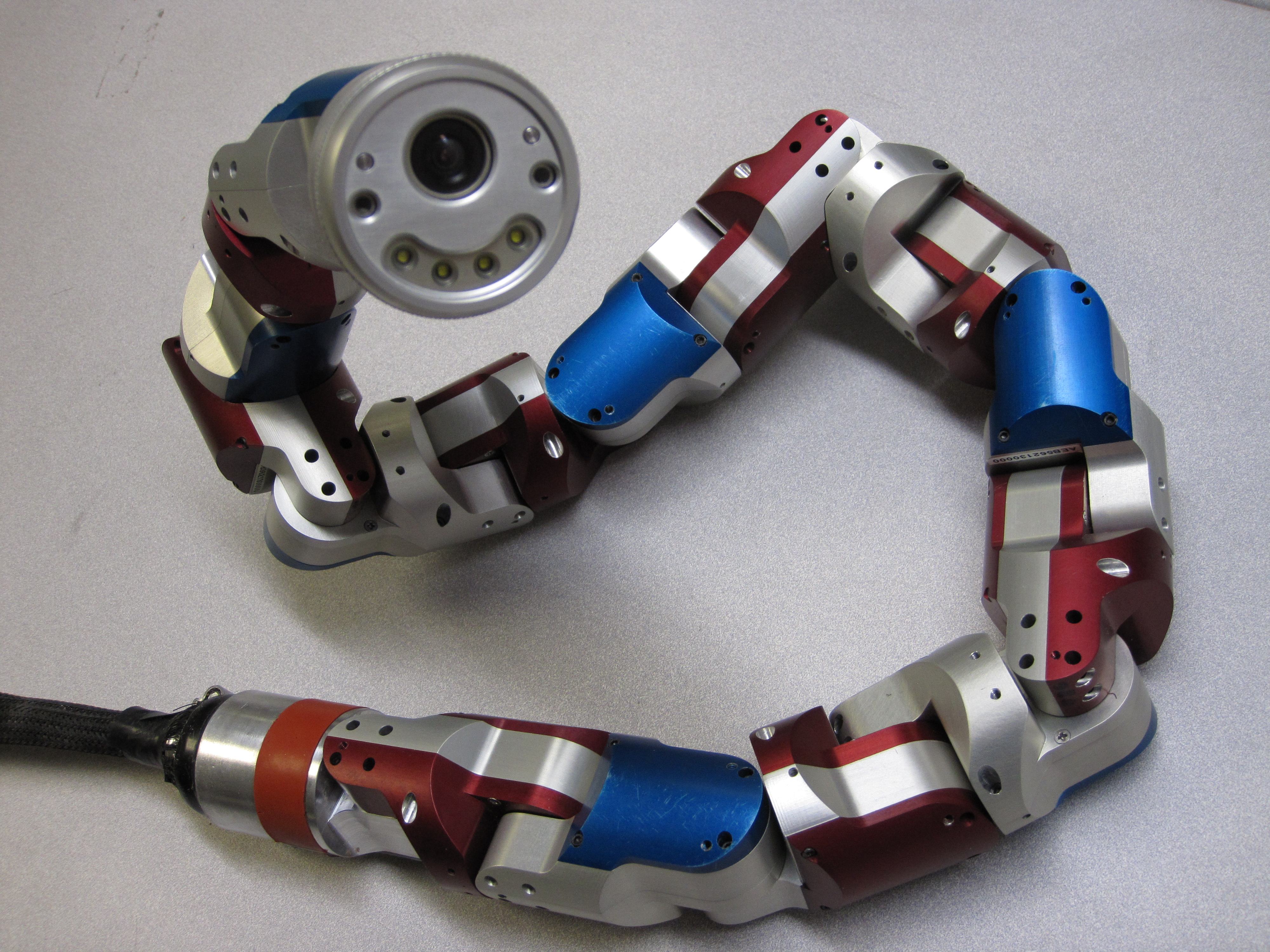
Fig. 第一代非SEA的蛇形机器人
Fig. 第二代带SEA的蛇形机器人
蛇形机器人由CMU的Howie Choset带领的Biorobotics Lab开发。其最大的亮点是模块化可拼接的身体。
硬件
蛇形机器人的硬件采用模块化的电机连接而成,分为头模块,尾巴模块和躯干模块。模块之间采用232的总线(待考证)通讯,供电采用串接方式。即,每个模块都有4个Pogo pin和4个焊盘,用于连接前、后的模块,其中两个pin为供电,另外两个pin为通讯。每个模块都带有自己的独立控制器,采用STM32F1系列。
- 头模块有探照灯和摄像头。
- 躯干模块有一个运动自由度,由maxon电机,编码器,SEA弹簧系统,惯导模块等组成,这部分构成了机器蛇运动和控制的核心。
- 尾部模块工业连接头拖出总控制线,连接到控制箱进行控制。
第二代蛇形机器人相对第一代,增加了SEA模块,其实本质就是在电机输出轴末端增加柔性弹簧,使单个模块增加柔性(优点)和不可控性(缺点)。SEA的另一个优点是可以做力控,同时带来的缺点是控制频率降低(至于为什么,欢迎@guzhaoyuan讨论)。
应用场景
用于军事探测,可进行管道内壁,树干外壁的攀爬
拓展
机器人链接
视频第二代SEA-Snake
视频第一代Snake
论文:Design and Architecture of a Series Elastic Snake Robot, D. Rollinson, et al.