 GitBucket
GitBucket
Newer
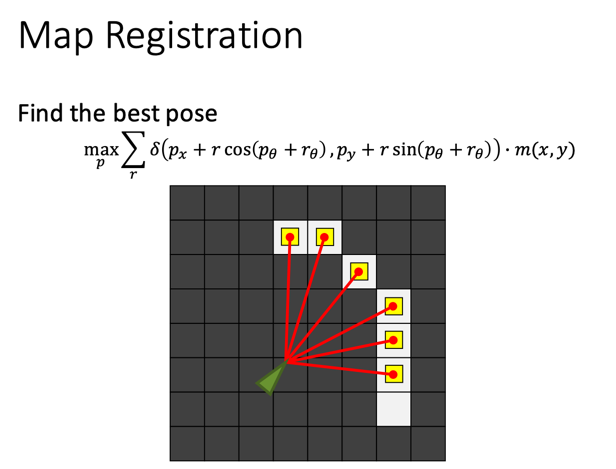
#Map Registration(地图配准)
LIDAR depth sensor (Light Detection and Ranging), 通常嵌入在激光雷达中,提供一个二维或三维的点,可建模如下:
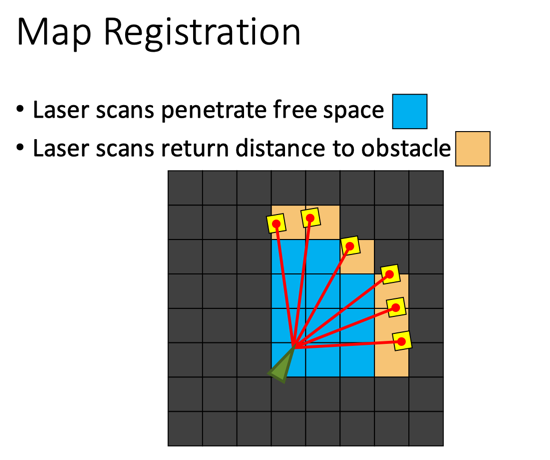
地图配准即是在已知一个全局地图的情况下,将LIDAR depth sensor的当前读数与之匹配,如下图所示:

$a-b$