GitBucket
GitBucket
Newer
#Configuration Space
首先构建Visibility Graph: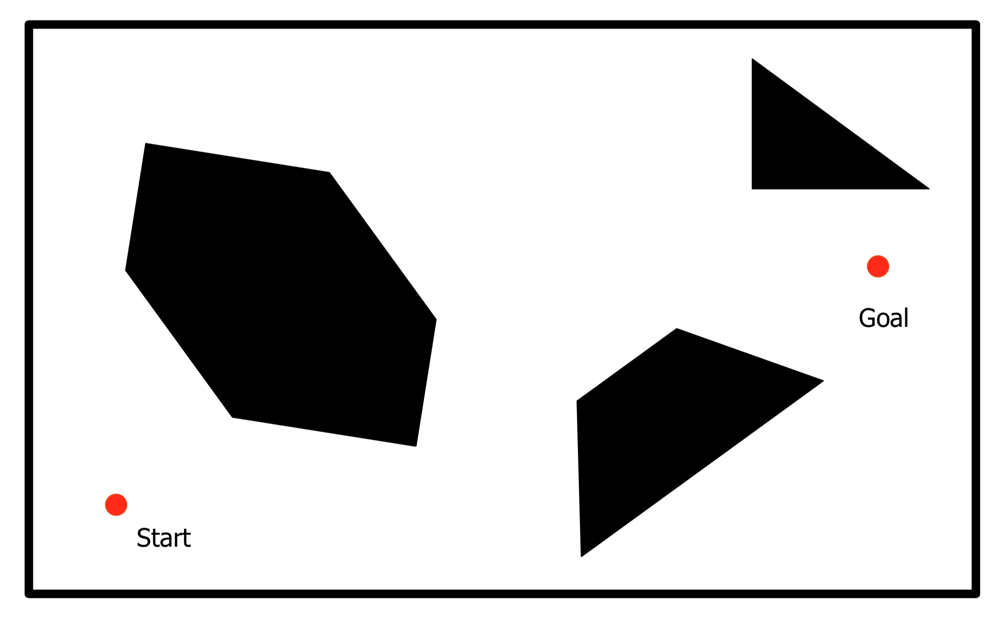
然后随机取点并进行碰撞检测得到边: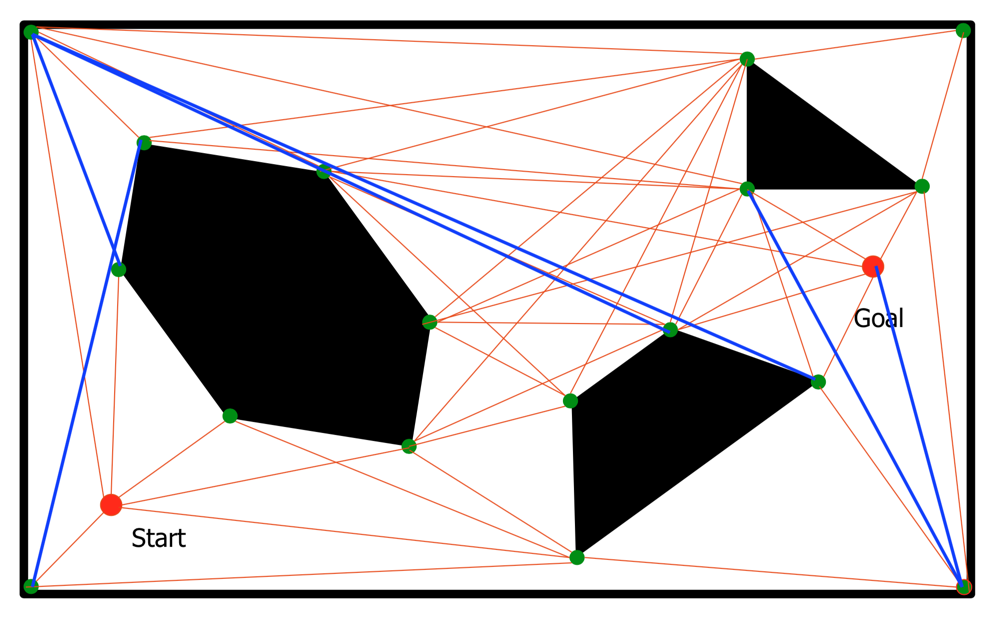
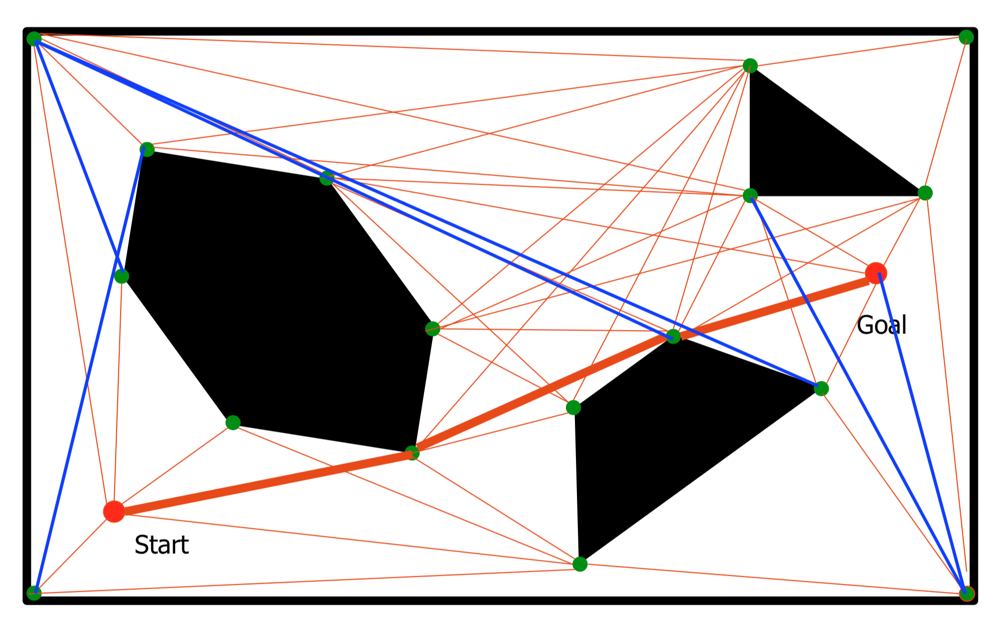
最后规划出路径: